BOW: Bayesian Optimization over Windows for Motion Planning in Complex Environments
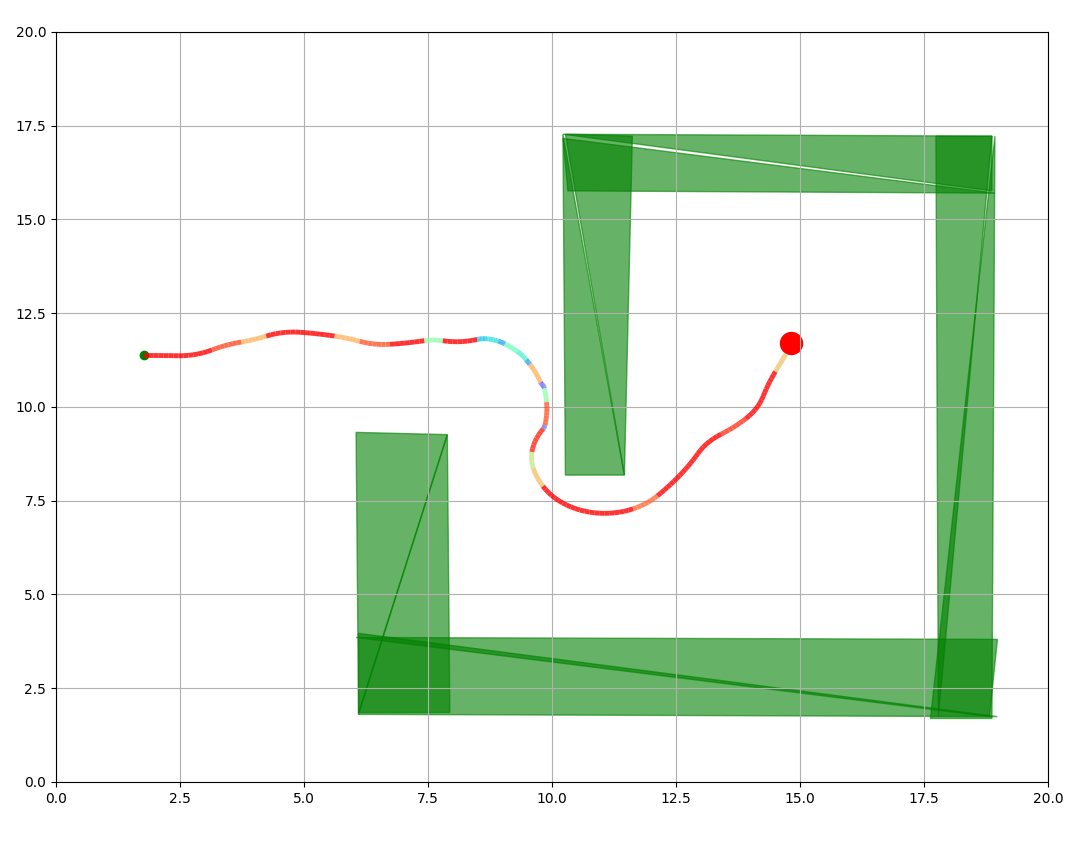
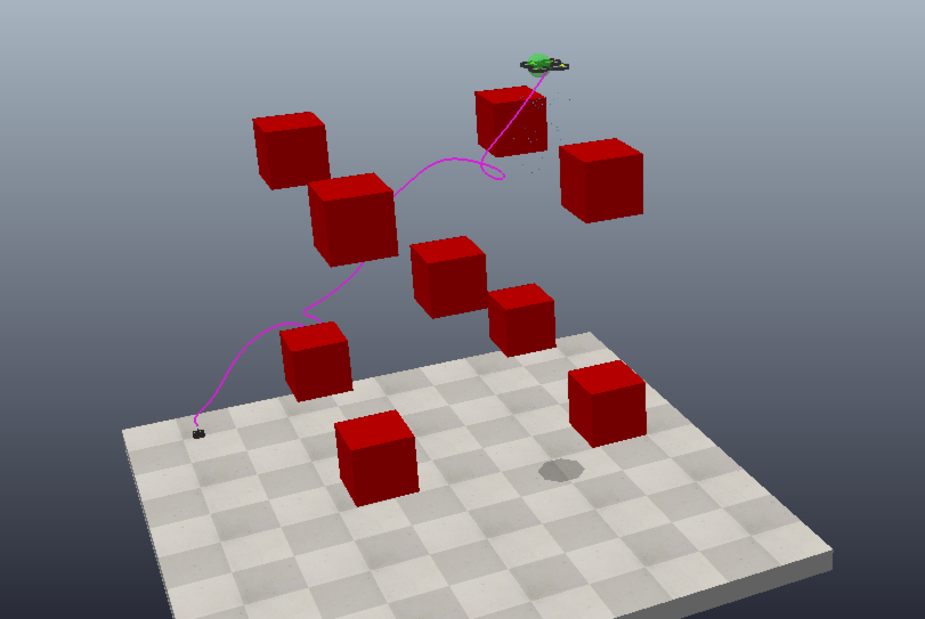
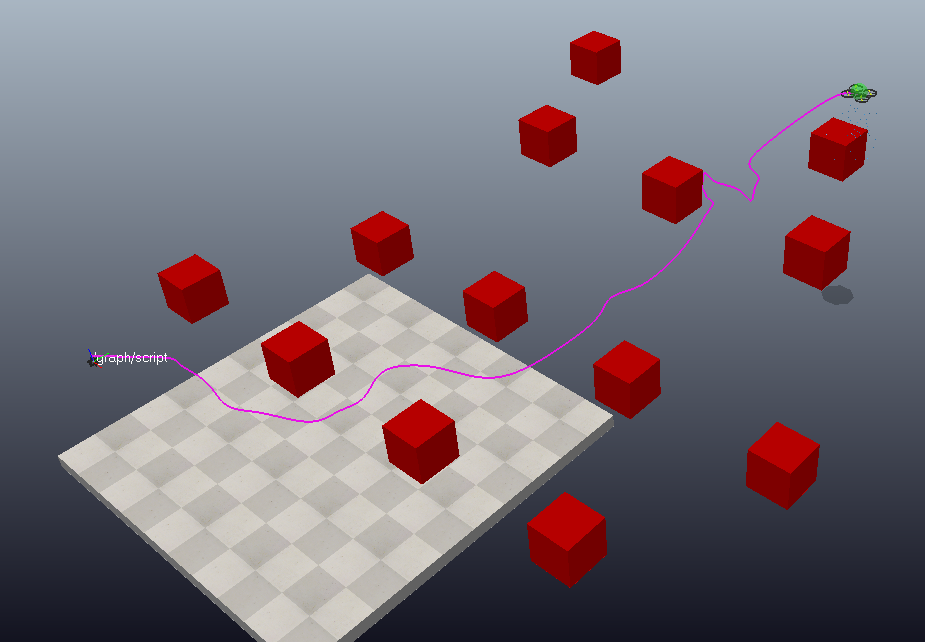
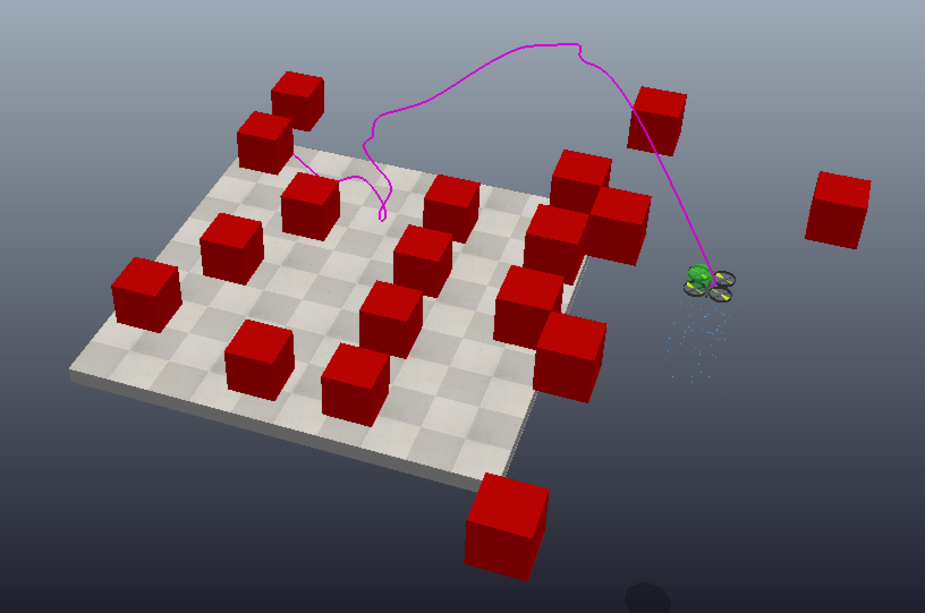
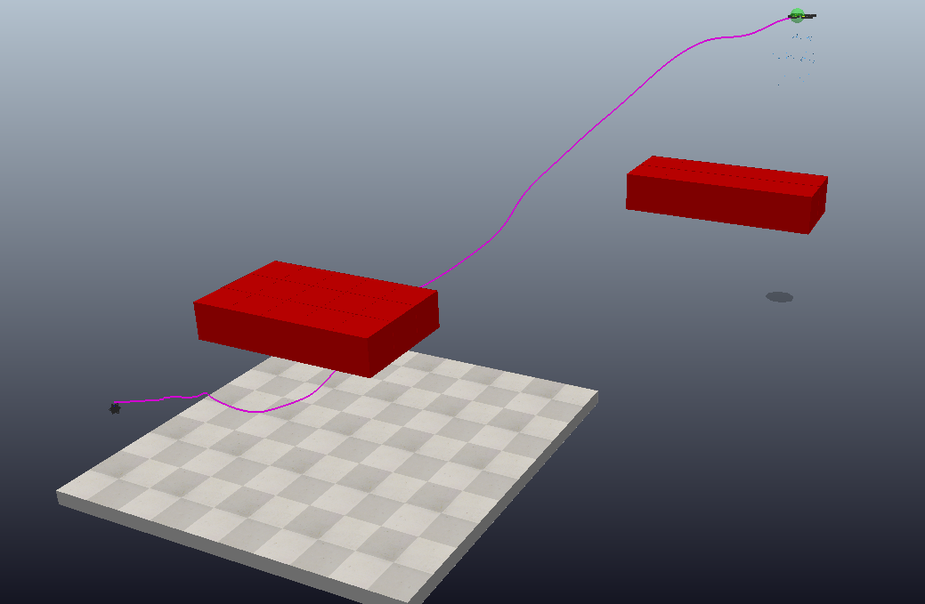
The BOW Planner is a motion planning algorithm that leverages constrained Bayesian optimization to expertly navigate robots through complex environments. By adeptly managing kinodynamic constraints such as velocity and acceleration limits, it ensures fast, secure, and near-optimal trajectory generation with remarkably few samples. Proven across real-world robotic systems, BOW stands out for its sample efficiency, safety-aware optimization, and scalability—making it a game-changer for robotic navigation.